Drones For Business: Why And How To Develop Them

Founder & CEO at Azoft
Reading time:
Drones do more than just shoot beautiful videos during travels and other memorable events. They deliver parcels, monitor objects, and can even replace people on deadly missions. Read this article to find out what businesses can use drones for and why, as well as how we help iFarm, an AgroTech startup, address business challenges using drones.
Drones, much like the Internet and GPS navigation systems, are developing beyond their military origin and becoming a powerful business tool. With technological advancements in and the rise in popularity of these small unmanned devices, the application areas of drones are growing rapidly. It’s no wonder that businesses all over the world are competing to get more out of this promising market. Research and Markets experts predict that the global UAV-based services market will grow up to $63.6 billion by 2025.
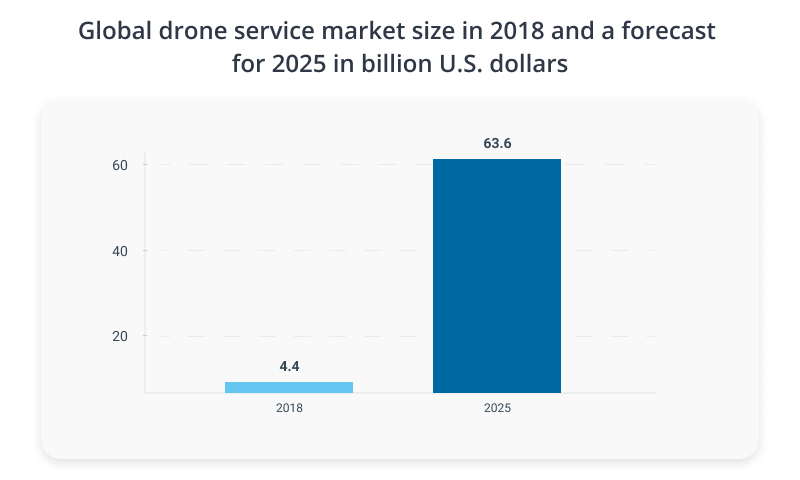
Source: Research and Markets
Progress in the UAV industry is being spearheaded by companies such as Walmart, Amazon, Sentera, Airwood, XAG, DroneAg, among others. Together with our partner iFarm, we also explore the unmanned technologies and apply them to solve business issues.
What businesses need drones
Drones have long ceased to be merely for entertainment purposes. These days, they easily cope with tasks that were previously considered impossible, and are becoming ever more useful and indispensable. They are already used in construction, agriculture, forestry, surveying, mining, energy, logistics, real estate, security, and safety.
Why drones are useful for business
One of the most common uses of drones in business is to deliver parcels and cargo. During pandemics, this solution is especially relevant as delivery by drones is contactless. In the United States, Finland and Australia, consumers are already getting essential goods, food and over-the-counter medication with the help of Wing drones developed by Alphabet (Google’s parent company).
Drones equipped with computer vision and machine learning technologies help businesses:
- enhance monitoring of production and ensure the highest possible product or service quality
- automate linear time-consuming and cost-intensive tasks
- inspect objects, including locations inaccessible and dangerous to humans
- monitor the condition of the equipment
- patrol territory
How we use UAV technologies for the iFarm project
Since the spring of 2019, Azoft has been working with the agricultural company iFarm. We help automate the linear business processes of production. To this end, we have developed and continue to improve upon a holistic IT infrastructure.
We also apply our research in the fields of autonomous flying drones, neural networks, and machine learning to automate production. Keep reading to learn about our progress, including the tasks set for us, the difficulties encountered, our decisions, implementation details and future plans.
The scope
Within the scope of current tasks on the iFarm project, we believe that unmanned technologies are promising in two key ways:
- Fast delivery of fresh products based on the farm-to-table concept.
This solution helps to avoid the problems of classical delivery methods such as rental and maintenance of warehouses as well as the processing of products for storage, among others.
Developing courier drones is an ordinary task. We need to finalize them to the cargo format and create a classic delivery infrastructure, which will include:
- automatic charging stations located on the empty roofs of urban buildings,
- a place for the parking and technical control of the courier drones,
- mobile window cargo receivers, which should be easily mounted to most plastic and wooden window systems.
In this direction, we worked less actively due to restrictions on the use of airspace by Russian legislation. However, recent positive changes in laws and the urgency of the pandemic have allowed us to resume work on the creation of a test infrastructure and a dispatch center for drone delivery.
- Monitoring complex objects, such as vertical farms.
The height of such objects depends on the room where iFarm autonomous growing technologies will be used.
This task turned out to be more difficult. The main problem was navigation inside a confined space. The farms are isolated from the outside as it is required to ensure biological safety and stability of the indoor air composition. This made it impossible to use GPS or GLONASS positioning technology, which cannot operate indoors.
Using an autonomous drone is perhaps an even more challenging task. Our R&D Department has accepted the challenge to create a solution within the framework of iFarm technologies.
Pros of using drones:
- the relative simplicity of the design of the drone,
- compactness, high mobility in all directions of space,
- the availability of components and their continuous technological development,
- high variability of configuration and settings,
- a large community of sports and freestyle drones.
The main disadvantage, or rather challenge, is the lack of stable and affordable methods of positioning indoors. Drones for aerial photography use GPS positioning systems together with accelerometers, compasses and electronic pendant systems for cameras. Most of these systems are not available indoors, so we needed to develop a positioning system.

The solution and challenges
With the help of the drone, we can satisfy most of iFarm’s monitoring system requirements, but the main challenge we are currently working on is the indoor positioning system.
There are several standard ways to solve the problem. These are, for example, ultrasonic or broadcast sensors with a map of their installation indoors. The drone monitors the current signal strength and correlates with the frequency and signal strength of the sensors on the room map – similar to GPS in an enclosed space.
Another classic method is marker positioning combined with “optic flow” technology. We chose this as the first prototype. This method does not require the installation of additional equipment in the room. You just need to stick the markers at the control points of the drone’s movement map.
We conducted successful tests that showed decent positioning accuracy with an error of 5-10 cm for a six-motor configuration. We concluded that the design of the copter is too large and not mobile enough. To fix this, we rebuilt the drone. Its structure was made on a classic model with four engines. This, together with the drone structure changes, increased positioning accuracy to the required level, which allowed operating in a limited space. We believe that this combination can already be put into production. All that remains is to make simple changes to provide greater security for the farm and its employees, namely:
- to protect the propellers with bumpers and casings,
- to assemble an autoloading system,
- to establish a system for transmitting footage to the server for further processing by neural networks and machine learning algorithms.
These tasks are linear. The main complex and risky tasks were made by us earlier.

Implementation
The drone consists of a carbon frame, a flight microcontroller with software, brushless motors, engine speed controllers and software, propellers, a battery, peripheral power supply system, lidar and wires connecting all of the subsystems. The flight microcontroller has a built-in accelerometer, barometer, temperature sensors and other sensors that monitor the current consumption and voltage of the battery.
A brief algorithm of the flight microcontroller is as follows:
- Computer vision algorithms send calculations to sensors and communication interfaces. The flight microcontroller then collects data from sensors and communication interfaces. From this, a complete source data package for the PID controllers of the flight microcontroller firmware is formed. PID controllers generate a control signal to obtain the necessary accuracy and quality of the transient.
- Based on the data obtained, the 32-bit core of the flight microcontroller calculates the values of the control signals in real time and sends them to the engine speed controllers.
- Upon receiving the control signals, the engine speed controllers, with the help of firmware, calculate and direct the necessary current from the battery to the motor windings, with the desired frequency. In response to the microcontroller, they send data on the current real speed of the motor and its consumption.
This is only part of the entire drone system. There is also a microcomputer installed on the drone. We are testing various microcomputers of an appropriate size. We have already mastered Raspberry PI, Rock Pi and Nvidia Jetson Nano. The next one is the most productive and technologically advanced in its size, the Nvidia Jetson Xavier NX, which opens up new horizons for the development of intelligence of the drone.
On such microcomputers, we perform calculations for various algorithms of computer vision, odometry and neural networks. Concurrently, we use video streams from cameras along with the sensor data provided by the flight microcontroller. Thus, the microcomputer and the microcontroller help each other stabilize the drone in space. Additionally, with the help of microcomputers, we encode and convert various formats of video streams and solve applied problems, including drone control.
Stage one results
At the first stage, we wanted to check whether the results were accurate enough when using the concept of marker positioning for “narrow” monitoring tasks. The drone was expected to automatically fall into the aisles between 80 cm wide rows and carry additional equipment on board. We needed to select and test the most efficient component model of the drone, its aerodynamic shape, and check a number of electronic components from Chinese, Turkish and American suppliers. After six months of work, we completed all the tasks. We are pleased with the results and, during the research process, generated many ideas for further improvement upon the design.
Further plans
As for the monitoring system, we plan to work on the following areas:
- Continuing work towards markerless positioning. The marker system works well, but we do not see the future of autonomous drones behind it. Drones should be smart enough not to require any external clues that might warp over time. We see a future where drones use the full range of modern technologies exclusively on their own board, such as neural networks, stereo vision, visual odometry, machine learning, and lidars.
- Developing a workplace for farm employees that allow for the creation of routes and flight plans for monitoring objects, as well as monitoring the results of work done by drones. This will help support the functioning of the marker system.
- Refining automatic recharging systems.
- Developing methods for controlling groups of drones to speed up the monitoring process at large iFarm objects.
- Reducing the weight and cost of electronic components and increasing their power.
As part of the task of creating a delivery system using drones, we plan to:
- Transfer the acquired experience from the indoor system to outdoor systems,where applicable.
- Develop on our own or take ready-made designs of cargo drones, test the options and choose the best ones for our customers.
- Develop a system for receiving light loads so that it is mounted in the base of the receiver’s standard windows. Thus, we plan to implement a system for receiving light loads and small parcels weighing up to 1 kg without the need to visit the points of receipt of cargo. We do not foresee, in the near future, the widespread use of drones capable of delivering loads heavier than 2 kg. Heavier loads carry a risk to human safety. They require the development of regulatory standards and security systems, which, in the best case, will take 2-3 years. However, getting a basket of strawberries without GMO, which were growing in the garden 5 minutes ago, directly in the window, is a realistic task right now.
- Continue designing and developing a system where private drone pilots can monitor autonomous delivery drones remotely. In case of emergency, pilots will be able to immediately intervene and take control of the drone, receiving a reward for each safe delivery. Delivery by cars, of course, will prevail for some time, but environmental issues such as pollution and health problems such as the spread of viruses will gradually supplant archaic and unsafe systems. New systems of symbiosis of drones and people will set new standards for speed, quality and convenience of services, and will also contribute to the emergence of new professions promoting future economic growth.
We are grateful to iFarm for the opportunity to apply our research to the benefit of business and industry progress. We will continue to work together with great interest and ardour to improve upon current solutions.

Why develop drones for business
From fast deliveries during rush hour to scanning an inaccessible object, drones are useful anywhere a human cannot act instantly and effectively.
Improving production efficiency, reducing workload and production costs, as well as solving security problems on a large scale, are just some tasks that drones solve worldwide.
Increasingly, companies and government organizations are seeking to take advantage of the rapidly developing unmanned technology. If you also wish to enhance your business with new technologies and develop a drone for your business tasks, we are ready to help you.

Comments